
Radio waves could help autonomous cars see corners
HoloRadar helps vehicles get a more comprehensive picture of their surroundings.
In late January, an autonomous car from Waymo (owned by Alphabet) was driving near an elementary school in Santa Monica, California, when a child suddenly ran into the street. Waymo’s LiDAR sensors detected the child, who had just emerged from behind a parked SUV, but it was too late. Despite slamming on the brakes and reducing its speed from 15 to 50 mph (27 to 9.7 km/h), the autonomous car struck the child and threw it to the ground. Reports indicate the child fortunately suffered only minor injuries. This is unlikely to be much comfort to parents whose children live in the ever-increasing number of cities with autonomous vehicles.
In this instance, Waymo detected the child as soon as it came into view—but what if it could have “seen” it around the corner? That’s the basic premise of a new study from the University of Pennsylvania. An engineering team has developed a sensor system that uses radio waves to help robots detect objects (or people) behind walls.
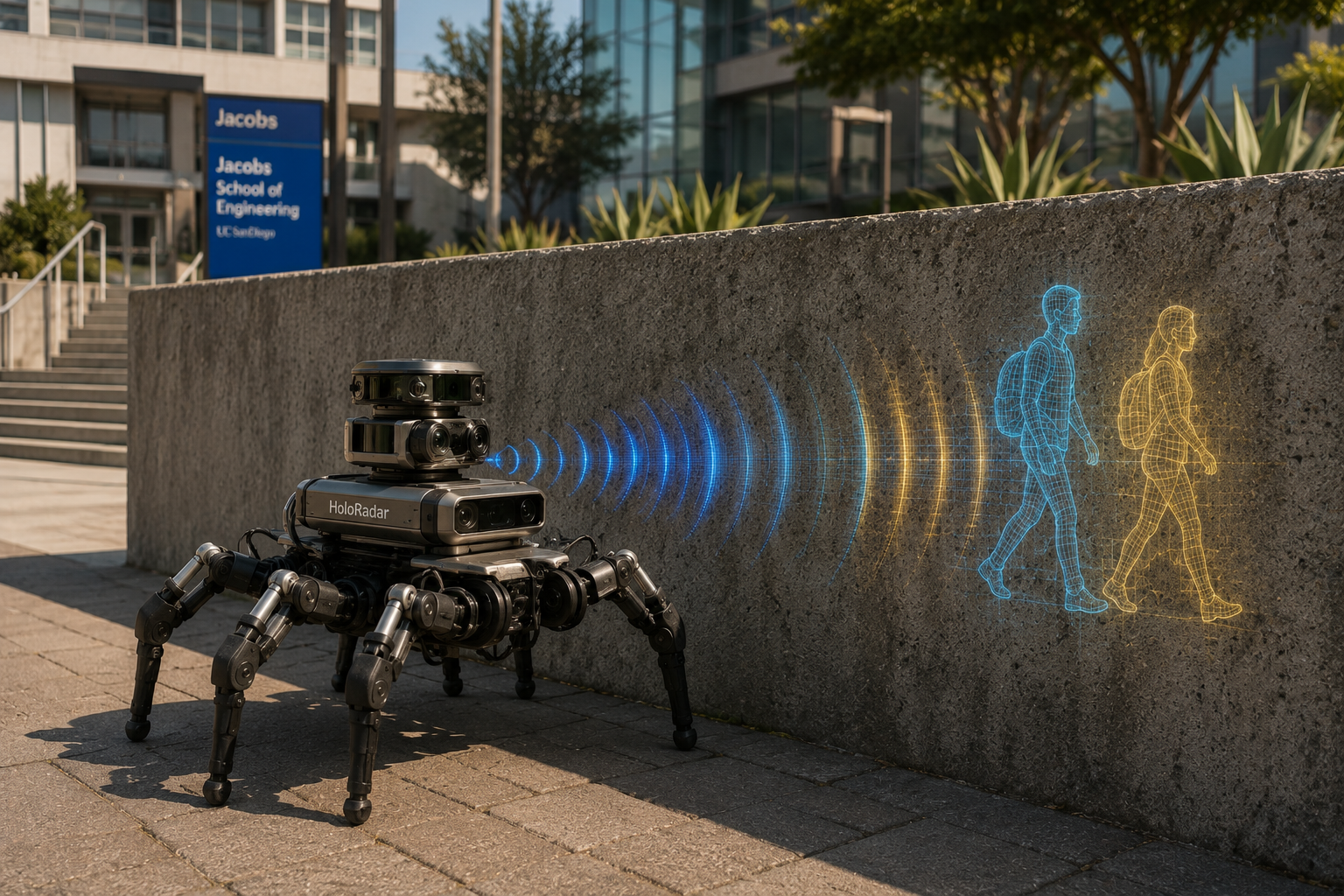
In testing, the HoloRadar system was mounted on small mobile robots and successfully identified people through walls as they moved across the campus. Although the research is still in its early stages, the team is optimistic that the sensor system can be integrated into robots to improve their navigation. For self-driving cars, it could make all the difference in preventing future collisions.
“Robots and autonomous vehicles need to be able to see beyond their immediate field of vision,” explained Mingmin Zhao, professor of computer science and information science and lead author of the study, in a University of Pennsylvania blog post. “This is an important step toward a more comprehensive understanding of the environment for robots,” Zhao added.
“Seeing behind walls” with radio waves
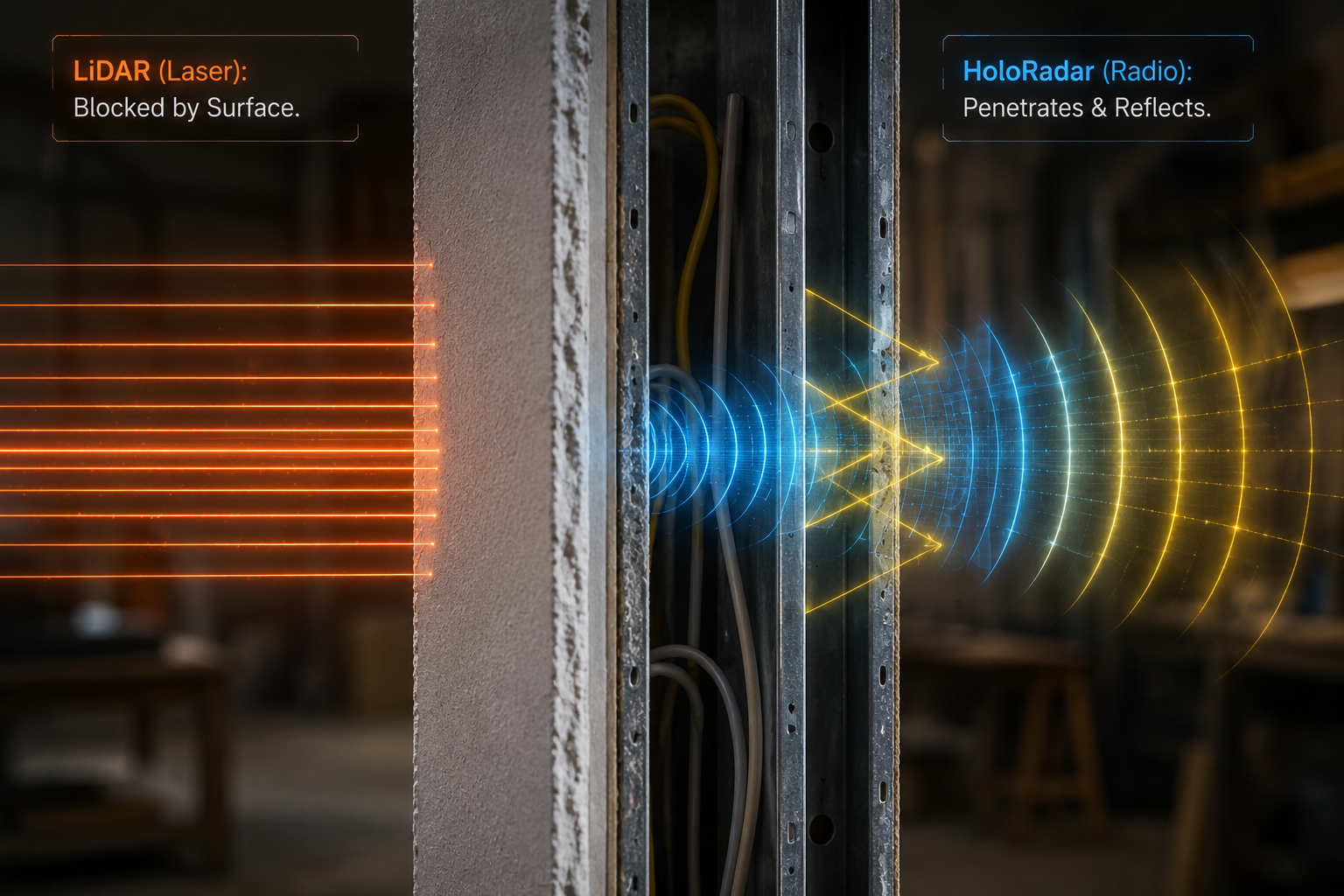
Although there are some notable exceptions (most notably Tesla), most new autonomous vehicles use a combination of cameras, radar, and LiDAR sensors to perceive their surroundings. LiDAR systems emit millions of laser pulses in all directions and measure how quickly they are reflected. Using this data, the systems create a highly detailed 3D map of the vehicle’s environment in near real time.
However, LiDAR has its limitations. Large buildings or other obstacles can block the laser pulses, preventing objects around corners from being detected. To overcome this problem, Zhao and his colleagues pursued an approach largely neglected by autonomous vehicle manufacturers: radio waves.
Researchers had previously avoided radio signals because they have significantly longer wavelengths than visible light, resulting in lower resolution and poorer image sharpness for object detection.
Image sharpness is crucial in this case to determine whether that blob on the road is a floating plastic bag or a scampering pet.
The team at the University of Pennsylvania eventually realized that this apparent limitation in LiDAR-based corner vision could actually be an advantage.
The radio waves emitted by a robot that strike a wall or other surface are much larger than the small surface irregularities of that wall. As a result, only a portion of the radio signal penetrates the obstacle, while a significant portion is reflected back to the source. The researchers explain that this effect essentially makes surfaces act like mirrors, reflecting radio signals in predictable patterns.
Can radio waves make autonomous vehicles safer?
Previous robotics research has attempted to solve the problem of seeing around corners, but with limited success:
In 2019: An MIT team used a camera mounted on a self-driving car to detect shadows in the lane. Theoretically, the system could detect the shadow of an approaching car at the far end of a parking garage and infer its presence.
More recently: Engineers at Stony Brook University used single-photon LiDAR to detect light trails even after they reflect around corners. The researchers noted that this approach was inspired by human drivers who use convex mirrors at busy intersections to see beyond their immediate field of vision.
However, the problem with both of these and other approaches is that they are fundamentally based on light waves. This means they don’t perform optimally in changing light conditions or darkness.
The HoloRadar Advantage
HoloRadar circumvents these limitations by using radio waves. Nevertheless, it is not a universal solution. Researchers at the University of Pennsylvania clarify that HoloRadar is intended to complement, not replace, the sensor systems already used in robots and autonomous vehicles.
Conclusion
Self-driving vehicles are becoming increasingly common in cities worldwide – for better or for worse. Accidents and at least a dozen fatalities have already occurred in the US, and this number will almost certainly rise as the vehicles become more widespread. The ability of these vehicles to “see” through walls could offer an alternative.
